
Overview

The solution proposed doesn't contain any special components, like photo-diodes, photo-transistors, or IR receiver ICs, only a couple if IR leds, an Op amp, a transistor and a couple of resistors. In need, as the title says, a standard IR led is used for the purpose of detection. Due to that fact, the circuit is extremely simple, and any novice electronics hobbyist can easily understand and build it.
Object Detection using IR light

Then all you have to do is to pick-up the reflected IR light. For detecting the reflected IR light, we are going to use a very original technique: we are going to use another IR-LED, to detect the IR light that was emitted from another led of the exact same type!
This is an electrical property of Light Emitting Diodes (LEDs) which is the fact that a led Produce a voltage difference across its leads when it is subjected to light. As if it was a photo-cell, but with much lower output current. In other words, the voltage generated by the leds can't be - in any way - used to generate electrical power from light, It can barely be detected. that's why as you will notice in the schematic, we are going to use a Op-Amp (operational Amplifier) to accurately detect very small voltage changes.
The electronic Circuit
Two different designs are proposed, each one of them is more suitable for different applications. The main difference between the 2 designs is the way infra-red (IR) light is sent on the object. The receiver part of the circuit is exactly the same in both designs.
Note: Both the sender and the receiver are constructed on the same board. They are separated in the schematics for simplification.
Design 1: Low range, Always ON

As you can see the schematic is divided into 2 parts the sender and the receiver. The sender is composed of an IR LED (D2) in series with a 470 Ohm resistor, yielding a forward current of 7.5 mA. The receiver part is more complicated, the 2 resistors R5 and R6 form a voltage divider which provides 2.5V at the anode of the IR LED (here, this led will be used as a sensor). When IR light falls on the LED (D1), the voltage drop increases, the cathode's voltage of D1 may go as low as 1.4V or more, depending on the light intensity. This voltage drop can be
detected using an Op-Amp (operational Amplifier LM358). You will have to adjust the variable resistor (POT.) R8 so the the voltage at the positive input of the Op-Amp (pin No. 5) would be somewhere near 1.6 Volt. if you understand the functioning of Op-Amps, you will notice that the output will go High when the volt at the cathode of D1 drops under 1.6. So the output will be High when IR light is detected, which is the purpose of the receiver. In case you're not familiar with op-amps, here is shortly and in a very simplified manner, what you need to know to understand how this sensor functions: The op-amp has 2 input, the +ve input, and the -ve input. If the +ve input's voltage is higher than the -ve input's voltage, the output goes High (5v, given the supply voltage in the schematic), otherwise, if the +ve input's voltage is lower than the -ve input's voltage, then the output of the Op-Amp goes to Low (0V). It doesn't matter how big is the difference between the +ve and -ve inputs, even a 0.0001 volts difference will be detected, and the the output will swing to 0v or 5v according to which input has a higher voltage.
Some applications of the 'low range Always ON' Design:
Notice how in both devices, the IR leds are encapsulated to protect them from ambient light. this kind of encapsulation was totally sufficient to overcome all noise due to ambient light for indoor applications.
Wheel Encoder

Contact-Less tachometer
This is a tachometer, that counts the revolutions per minute of a rotating object, given that the object has a reflective stripe glued on it, that will pass in front of the IR sensor for each and every revolution, giving a pulse per revolution. Again a microcontroller will have to be used to 'understand' the data provided by the sensor and display it. Many commercial contact-less tachometers, that are sold for more than $200 rely on this simple idea!
Design 2: High range, Pulsed IR

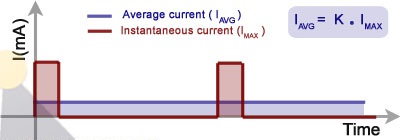
Pulsed IR, Duty cycle, Average and Instantaneous current. Now, hands on the circuit that will put all this theory into practice. The CTRL input in the figure, stands for Control, and this pin should be connected to the source of the low duty cycle pulses discussed above, whether it is a microcontroller or an LM555 timer that generates the pulses. The calculations yielded that a 10 ohm resistor is series with the LED D2, would cause a current of approximately 250 mA to flow through the LED. A current this high, would destroy the LED if applied for a long period of time (some dozens of seconds), this is why we have to send low duty cycle pulses. The first Op-amp will provide voltage buffer, to enable any kind of device to control the
sensor, also, it will provide the 30mA base current required to drive the base of the transistor. The calculation of the the base resistor R3 depends on the type of transistor you use, thus on how much current you need on the base to drive the required collector current.

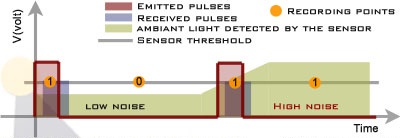
Software based ambient light detection.
Micro controller Program
Components positioning:

This 3D model shows the position of the LEDs. The green plate is the PCB holding the electronic components of the sensor. you can notice that the receiver LED is positioned under the PCB, this way, there wont be ambient light falling directly on it, as ambient light usually comes from the top. It is also clear that this way of positioning the LEDs prevent the emitted IR light to be detected before hitting an eventual obstacle.
Another important issue about components positioning, is the distance between the receiver LED and the Op-Amp. which should be as small as possible. Generally speaking, the length of wires or PCB tracks before an amplifier should be reduced, otherwise, the amplifier will amplify - along with the original signal - a lot of noise picked up form the electromagnetic waves traveling the surrounding.
Here is an example PCB where the distance between the LED and the Op-Amp is shown. Sure this distance is not as critical as you may think, it can be up to 35mm without causing serious problems, but trying to reduce this distance will Always give you better results.
Actually, when I design the PCB, I start by placing the receiver LED and the Op-Amp, as near to each others as possible, then continue the rest of the design.
An example PCB construction

You can download here the project folder containing the schematic, the PCB design, and an example code for 8051 microcontroller to send the low duty cycle pulses. In this design, the LM358 Op-Amp is mounded on the copper side, to save some space. The POT is the potentiometer used to adjust sensitivity.
As explained before, the sender and receiver LEDs are on both sides of the PCB.
Testing the High range Pulsed IR sensor

0 comments:
Post a Comment
Thanks for your Valuable comment